Components Developed for UAV Research
Every effort has been made to reduce the hardware complexity of these components. I designed most of them to work together in a variety of combinations. The software also provides considerable flexibility. Release of full construction and programming details is under consideration.
A overview of this flexibility, as it applies to the autopilots, is contained in 'An Unmanned Aerial Vehicle Autopilot'. The use of the name "Leveller" is a historical misnomer as the autopilots provide full attitude control and their functionality should not be confused with wing-levellers.
- Autopilot (V3)
- Intersema Airspeed and Altitude
- Motorola Airspeed and Altitude
- Battery Monitor
- Leveller (V2)
- Navigator (V1)
- Altera FPGA Autopilot Adapter
- MaxStream Link Adapter
- MaxStream R/C Link Adapter
- Groundstation (V2)
- Groundstation (V1)
- Single Port Smart Lead
- VHF Link Packetiser and Beacon
- Dual Port Smart Lead
- RS232C to TTL Translator
- Altitude Alarm
- Commissioned boards and other avionics
Autopilot (V3)
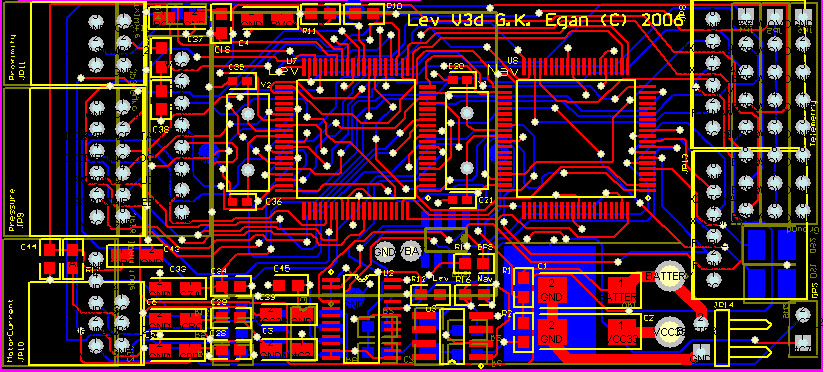
- Dual Microchip 18F8722 @ 40MHz
- 3V Trimble Lassen SQ GPS
- 2 LEDs
- Interfaces to:
- 3 channel IR attitude sensor (Melexis or equiv.)
- 6 PPM inputs
- 8 PWM servo channels
- Dallas 1Wire temperature
- ADC proximity sensor
- ADC motor current shunt sensor
- 4 bit port to Airspeed and Altitude sensors
- 4 bit yaw gyro port
- VCC 5V
- Supply 6.5V+
- Dimensions 75x34mm
Intersema Airspeed and Altitude
![]()
- Altimeter Intersema MS5534A
- Airspeed Intersema MS5536
- LED
- Interface to Autopilot (V3)
- VCC 3 or 5V
- Dimensions 49x15mm
Motorola Airspeed and Altitude
![]()
- Altitude Motorola MPX4115
- Airspeed Motorola MPX5010
- LED
- Interface to Autopilot (V3)
- VCC 3 or 5V
- Dimensions 48x14mm
Battery Monitor
![]()
- Microchip 12C675 @ 4MHz
- Dallas/Maxim battery monitor
- Dallas 1Wire port
- VCC 3.3V
- Dimensions 24x10mm
This was designed to be embedded within the primary motor battery packs. Unlike Laptop packs most aircraft do not have full condition monitoring built-in. The liability aspects make this an issue unlikely to continue. Currently sophistacted battery chargers are used, now with the increasing inclusion of cell balancing particularly for the more volatile battery chemistries (LiPo). Not commisioned.
Leveller (V2)
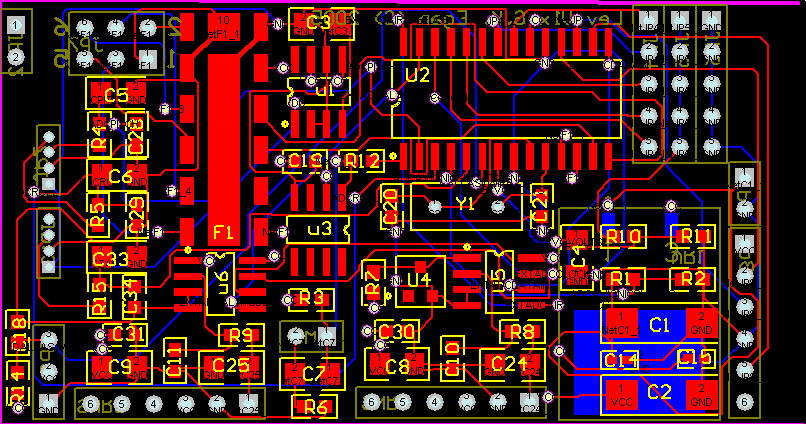
- Microchip 18F2520 @ 40MHz
- Altitude Motorola MPX4115
- Airspeed Motorola MPX5010
- 3V Trimble Lassen SQ GPS
- Interface to:
- 2 channel IR attitude sensor (Melexis or equiv.)
- TTL USART Ports
- 4 PPM Receiver inputs
- 7 PWM servo outputs
- Dallas 1Wire temperature sensor
- ADC proximity sensor
- ADC Motor current shunt sensor
- ADC servo voltage
- ADC battery voltage
- VCC 5V
- Supply 6.5V+
- Dimensions 66x34mm
Originally used Microchip 16F876 and then upgraded to 18F2520; a far better option.
Navigator (V1)
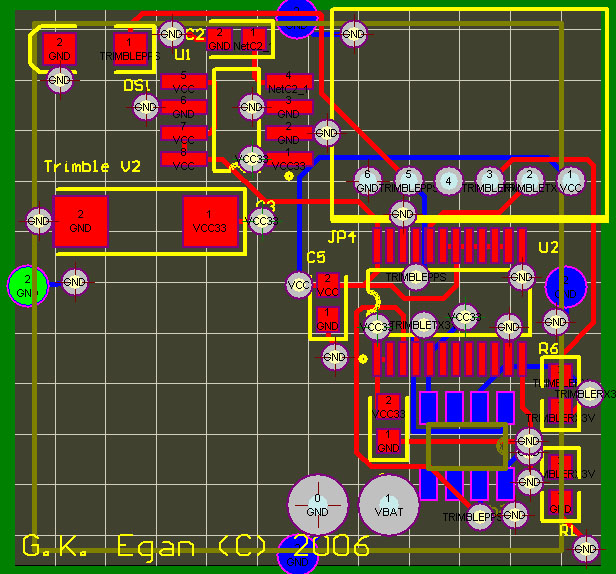
- Microchip 18F8722 @ 40MHz
- 3V Trimble Lassen SQ GPS
- 2 TTL USART ports
- LED
- VCC 3/5V
- Supply 6.5V+
- Dimensions 30x28mm
Usually used in one of two configurations:
- Alone with relaying aircraft position by the telemetry link, or
- Exchanging mission planning information including target heading, altitude and airspeed to a Leveller (V2) while relaying navigation and leveller data.
Altera FPGA Autopilot Adapter
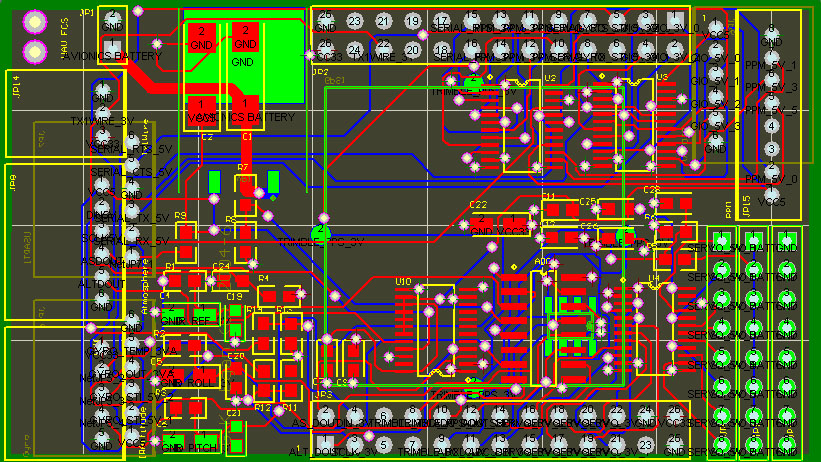
- Trimble Lassen SQ GPS
- 2 LEDs
- Interfaces to:
- 6 PPM inputs
- 8 PWM servo outputs
- 3 Channel IR attitude sensor input
- 4 bit Yaw Gyro port
- 4 bit GPIO
- Dallas 1Wire port
- 4 bit serial interface for Airspeed and Altitude sensors
- VCC 3/5V
- Supply 6.5V+
- Dimensions 70x40mm
This was designed as a daughter board to a general purpose Altera FPGA processor the latter normally running the NIOS soft-processor. The design was to support an FPGA based autopilot.
MaxStream Adapter
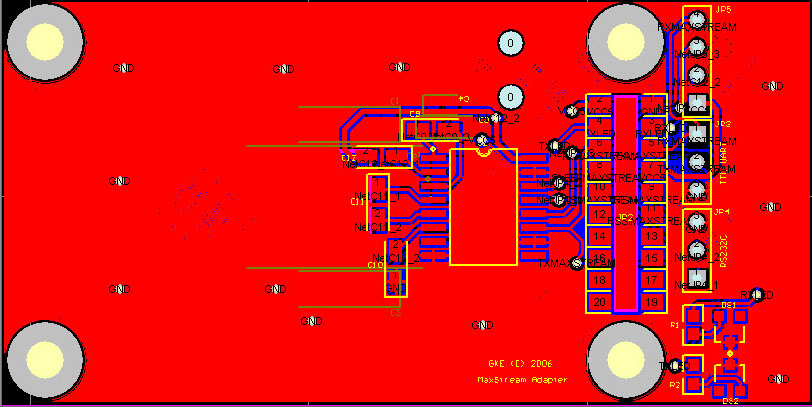
- MaxStream 900Mhz transceiver
- RS232C USART port
- 1 LED
- VCC 5V
- Supply 6.5V+
- Dimensions 74x37mm
- photo
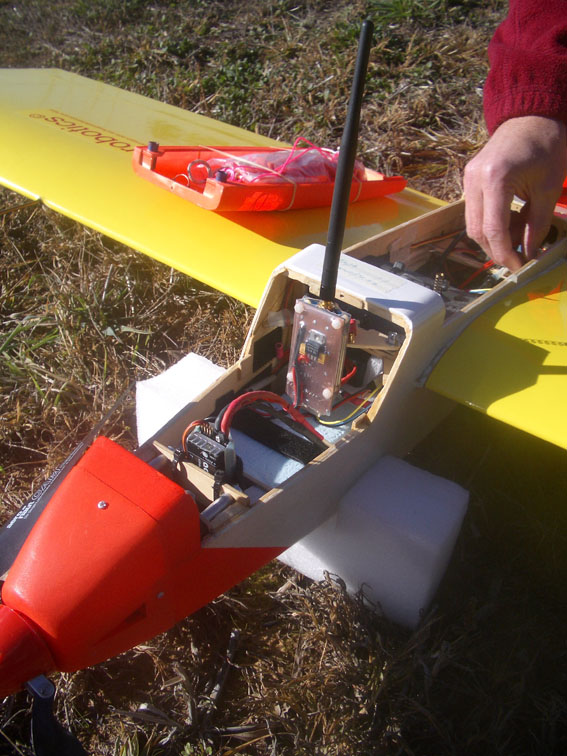{kind=link}
MaxStream R/C Adapter
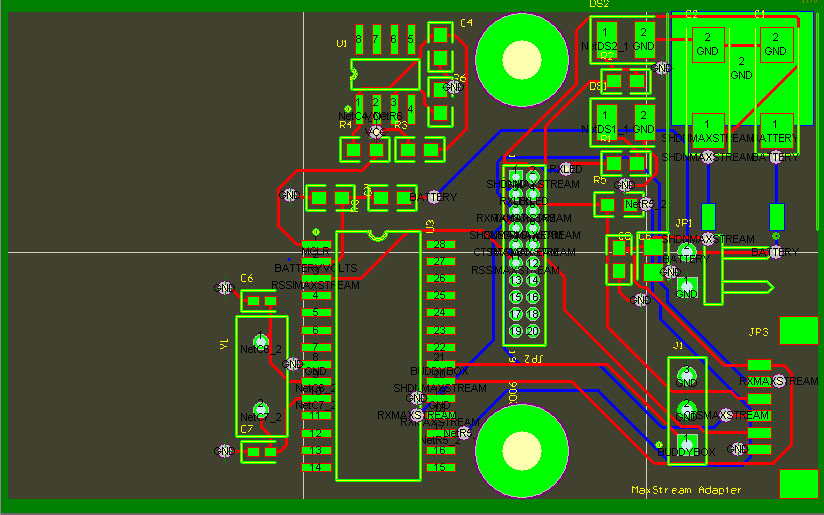
- MaxStream 900MHz transceiver
- Microchip 18F2520 @ 40MHz
- TTL buddy box serial input
- RS232C USART port
- VCC 5V
- Supply 6.5V+
- Dimensions 60x37mm
This is an extended version of the MaxStream Adapter that interfaces with JR (or other) RC Transmitters through a buddy box interface. The buddy box command stream is translated and packetised by RC channel before transmitting to the on-board autopilot. Only changed channels are transmitted to conserve bandwidth.
Groundstation (V2)
Designed as an inexpensive standalone pocket-size display of essential airframe and navigation data transmitted by our autopilots. Also acts as a de-packetiser for Micropilot autopilots. Outputs NMEA sentences for laptop display. To be replaced by a PDA based groundstation as the next development.
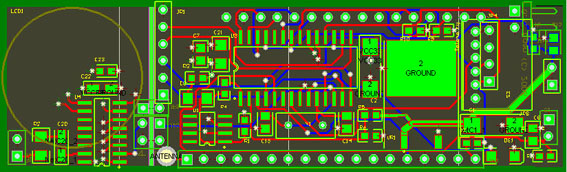
- Radiometrix RX1 VHF Receiver
- Microchip 18F2520 @ 40MHz
- TTL USART port
- 4 bit TTL GPIO (MMC)
- Audio output for Vario
- 24x2 LCD
- VCC 5V
- Supply 6.5V+
- Dimensions 84x25mm
Groundstation (V1)
- Radiometrix RX1 VHF Receiver
- Microchip 18F2520 @ 40MHz
- 24x2 LCD
- TTL USART port
- Audio output for Vario
- 256K Serial EPROM
- 1 LED
- VCC 5V
- Supply 6.5V+
- Dimensions 56x50mm
Single Port Smart Lead
![]()
- Micropilot 16C675 @ 4MHz
- 1 TTL input
- 1 TTL output
- VCC 3.3V+
- Dimensions 8x4mm
General purpose TTL signal to TTL translator. Uses include:
- RC PPM signal integrity monitoring triggering an appropriate PWM signal to parachute or other flight termination device.
- RC receiver servo signal monitoring maintaining and transmitting counts periodically on a downlink for signals outside acceptable PPM specifications.
- Translation of RC PPM signals to camera commands.
VHF Link Packetiser and Beacon
- Radiometrix BIM1 VHF transceiver
- Microchip 18F2520 @ 40MHz
- TTL USART port
- 2 LEDs
- VCC 5V
- Supply 6.5V+
- Dimensions 34x26mm
The Radiometrix VHF transceivers require a preamble sequence to allow the data slicers to establish communications. The board may also be used as the Failsafe Beacon link pair. Version 1 of the packetiser was hand built board using an Microchip 18F876 with 2 TTL USART ports to transmit Micropilot telemetry oer a Radiometrix VHF link.
Dual Port Smart Lead
![]()
- Microchip 12V675 @ 4MHz
- 2 TTL inputs
- 2 TTL outputs
- 1 FET switch
- LED
- VCC 3.3V+
- Dimensions 23x13mm
The Smart Lead can perform almost any combination of mixing and/or monitoring of up to two TTL inputs to create two TTL outputs. It is intended for shrinking inline into cables.
Examples of use include:
- monitoring Beacon signals and the Autopilot falisafe channel. If either fires then an output drives the parachute release servo.
- Translation of RC PPM signals to camera commands and switch closure for on/off.
- mixing a single PWM channel to two aileron servo PWM trains.
RS232C to TTL Translator
![]()
- TTL/RS232C
- VCC 5V
- Supply 6.5V+
- Dimensions 20x14mm
Translates RS232C to TTL UART signalling levels. Intended for shrinking into a cable.
Altitude Alarm
- Microchip 18F876 @20MHz
- TTL output to flash
- TTL USART port
- VCC 3V
- Supply 4.8V+
- Dimensions 66x34mm
Derived from Leveller (V2) as an altitude alarm for RC model aircraft. In use it pulses a camera flash and transmits an alarm tone to a simple groundstation when various altitude thresholds are reached. Developed at the request of the VARMS club who provided us with access to their flying field for our research. Ultimately spare Leveller (V2) boards were used.
Acknowledgement
I wish to thank Ray Cooper, Ian Reynolds and Paul Jenkins for their assistance in commissioning and, in some cases, improving these designs; team work.